管网检测全地形机器人Gator-s1 产品概述:
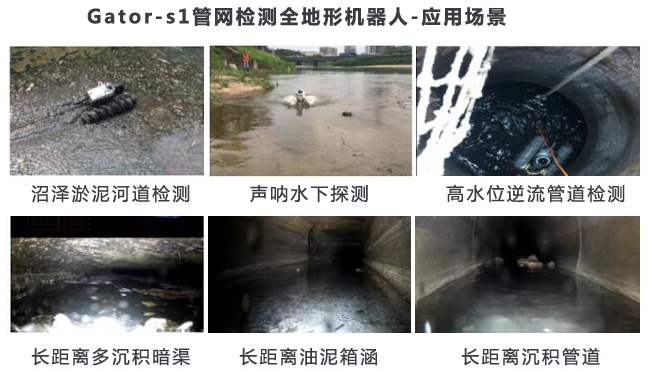
动力检测船采用螺旋式推进结构,极大扩展了适用环境,除适用于水体外,还适用于浅水泥沙滩和沙地。在有水的管道、箱涵、河流等环境下可带载声呐探头,回传管道截面数据。同时,搭载了激光测距装置,配合水下声呐数据,可间接测量淤泥厚度。可适用于市政排水管道、暗河箱涵、河流浅滩等情况。

管网检测全地形机器人Gator-s1 产品特点:
轻便灵活,最小进入DN600管道
可适用于水、沙水混合、泥水混合、沙地等多个环境
具备超强动力船体,不容易受到水中杂物(漂浮垃圾)影响
可搭载声呐,测绘水中管道截面
单次作业最远距离可达300m到1000米
人性化数据处理软件,可叠加多种数据
管网检测全地形机器人Gator-s1 产品应用:
管网检测全地形机器人Gator-s1 产品参数:
| 机器人 | 尺寸 | 760*460*325mm |
| 825*460*325mm(带载声呐) | ||
| 重量 | 12.5kg(含一块电池) | |
| 适用管径 | ≥DN600 | |
| 防护等级 | IP68;防爆 | |
| 前向大灯 | 9w | |
| 前侧向大灯 | 6w | |
| 后向大灯 | 9w | |
| 激光测距 | 范围0.1-12m | |
| 精度±1% | ||
| 前置摄像头 | 300万 | |
| 后置摄像头 | 300万 | |
| 机器人转向 | 原地360° | |
| 动力系统 | 驱动方式 | 螺旋双轮驱动,单轮双螺旋 |
| 螺旋导程 | 180mm | |
| 电机功率 | 120W | |
| 最大转速 | 262RPM | |
| 沙地最大推力 | 5KG | |
| 沙地最大速度 | 0.6m/s | |
| 静水最大速度 | 0.3m/s | |
| 适用逆水速度 | ≤0.2m/s | |
| 主摄像头(云台) | 水平旋转角度 | 0-359° |
| 俯仰角度 | 0-90° | |
| 图像传感器 | 1/2.8"Progressive Scan CMOS | |
| 最低照度 | 彩色:0.05Lux@(F2.0,AGC ON) | |
| 分辨率 | 1920*1080p | |
| 像素 | 200万 | |
| 焦距 | 2.8-12mm | |
| 变倍 | 4倍光学 | |
| 水平视角 | 105-33° | |
| 电池 | 容量 | 10.5Ah |
| 标称电压 | 22.2V | |
| 续航时间 | 连续工作2h | |
| 配置数量 | 2 | |
| 线缆车 | 尺寸 | 450*510*235mm |
| 重量 | 20kg | |
| 通讯距离 | 标配300米(选配500米、1000米) | |
| 线缆抗拉能力 | 50kg | |
| 收线方式 | 电动 | |
| 内置电池 | 14.5Ah | |
| 续航时间 | 6-8h | |
| 无线通信 | wifi | |
| 充电时间 | 3.5h | |
| 线缆材质 | 浮力线缆 | |
| 控制终端 | 尺寸 | 248*173*7.8mm |
| 重量 | 465g | |
| 存储 | 64G | |
| 续航时间 | 8h | |
| 接口 | Type-C 兼容手机接口与充电器 | |
| 声呐 | 型号 | SCANFISH-II |
| 频率一 | 667KHZ | |
| 频率二 | 2MHZ | |
| 开角一 | 7.5*2.6° | |
| 开角二 | 2.5*0.9° | |
| 最小检测距离 | 50mm | |
| 最大检测距离 | 2MHZ:6m 667KHZ:12m | |
| 适用最大深度 | 1000m | |
| 精度 | 2.00mm@2MHz,1m | |
| 2.60mm@2MHz,2m | ||
| 5.00mm@2MHz,6m | ||
| 数据刷新频率 | 1Hz@1m | |
| 水中重量 | 0.4kg | |
| 充电器 | 输入电源 | AC Input 200-240V,50-60Hz |
| 输出电压 | DC Output 25.2V | |
| 充电电流 | 3A |
Gator-s1, 管网检测全地形机器人, 管道机器人, 管道检测
 |
|